
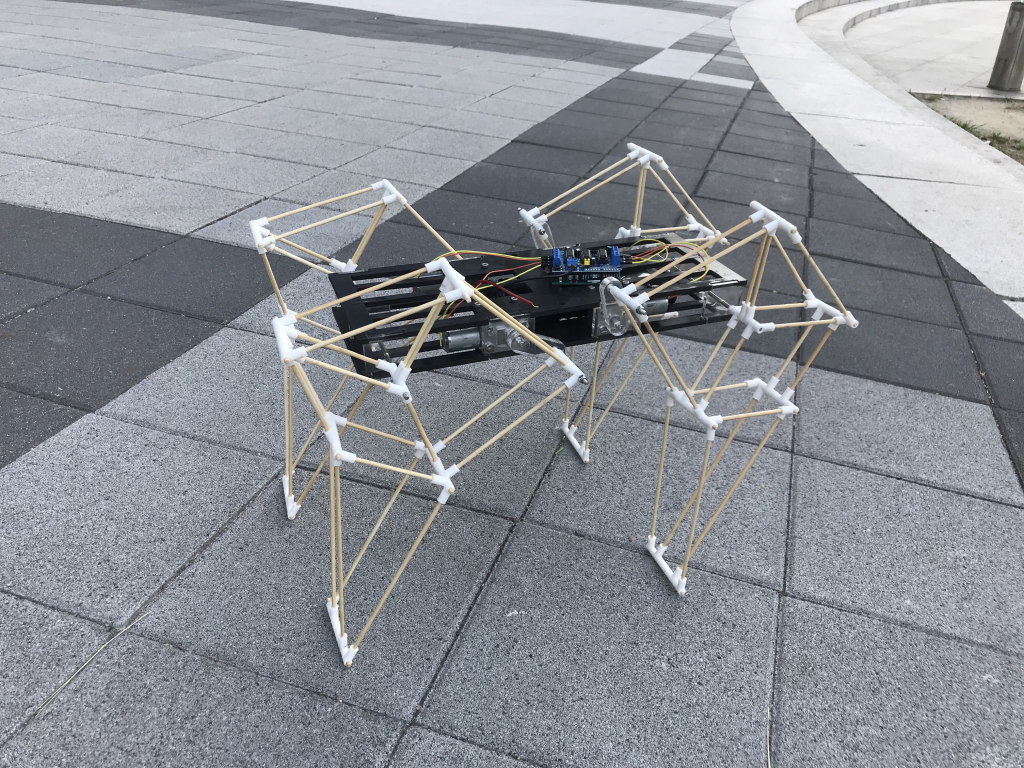

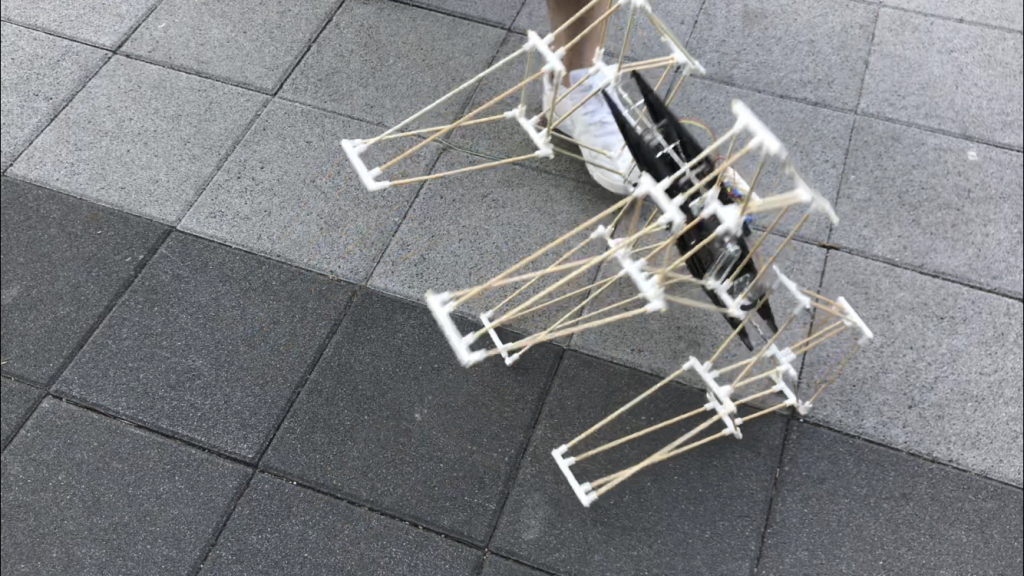
It is a state of imbalance in each leg because it is forced to assemble in different state of each leg length. But the reason seems to be that robot is not walking more than the previous version (before using the iron shaft, when it was not rigidly fixed) is legs were shaking more. Now that the version is stiff, it will not balance when you walk further Because it is too light, the recoil seems to be happening better.