
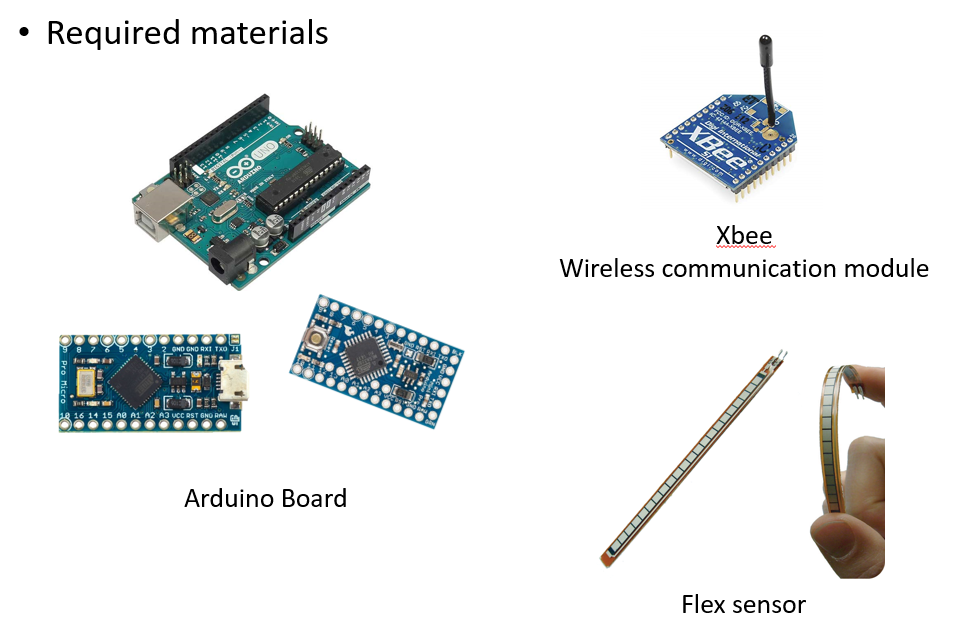
Let’s create a moving RC car using hand gestures. I made it using flex sensor and Xbee communication module.

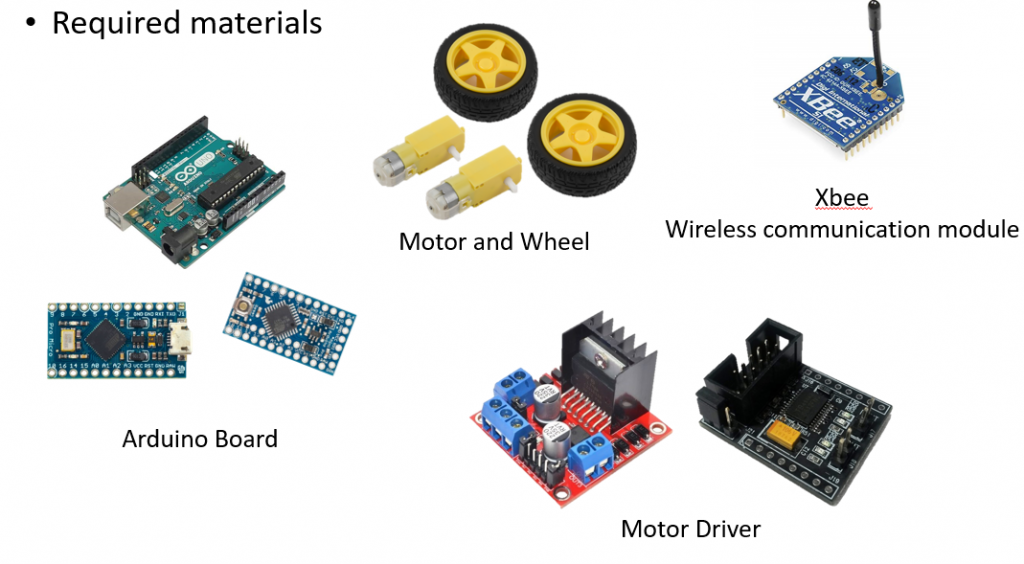
Materials
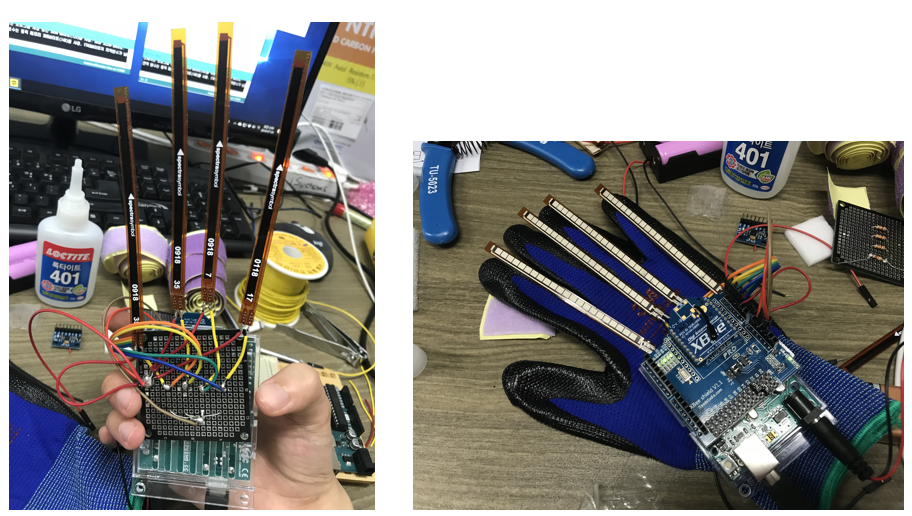
Hardware – glove with flex sensor and transmitter
Hardware – RC car with receiver
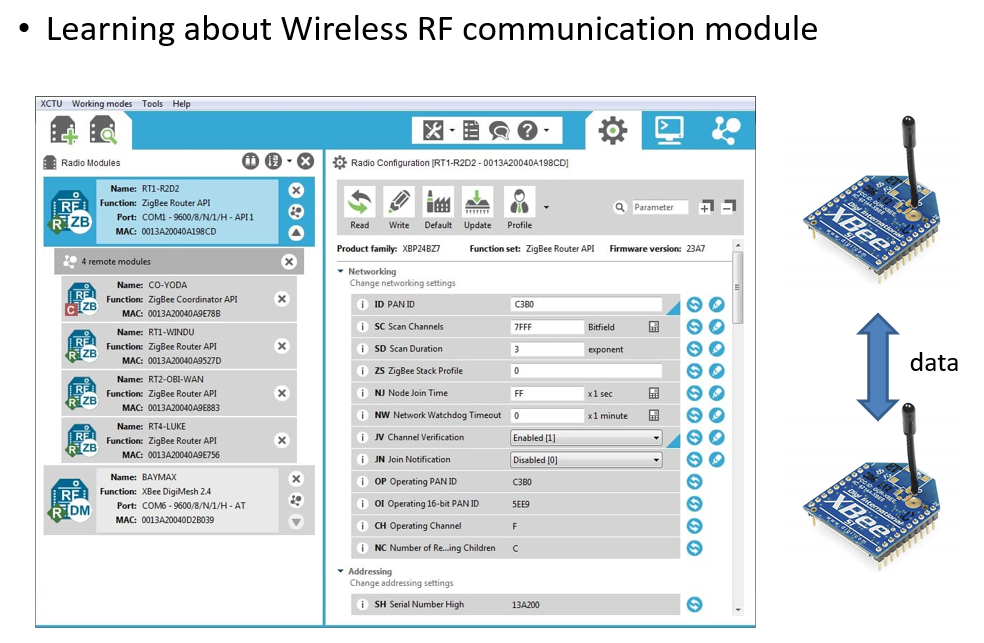
XCTU
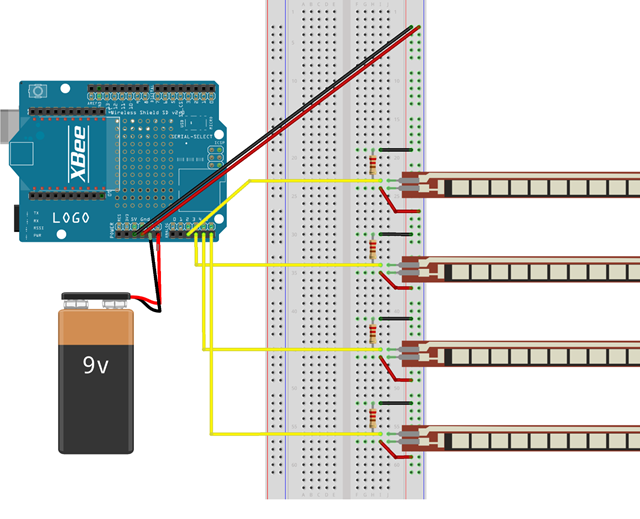
Circuit Design for glove
Code
mobile TX codeFold code
Plain text
Copy to clipboard
Open code in new window
EnlighterJS 3 Syntax Highlighter
// 송신부 장갑
#include<SoftwareSerial.h>
#include<Wire.h>
SoftwareSerial xbee(2,3);
/*
const int MPU = 0x68;
int16_t AcX, AcY, AcZ, Tmp, GyX, GyY, GyZ;
int xStable = 96;
int yStable = 90;
*/
int flexpin1 = A5;
int flexpin2 = A4;
int flexpin3 = A3;
int flexpin4 = A2;
void setup()
{
xbee.begin(9600);
Serial.begin(9600);
/*
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B);
Wire.write(0);
Wire.endTransmission(true);
acc scale
Wire.beginTransmission(MPU);
Wire.write(0x1C);
Wire.write(0xF8);
Wire.endTransmission(true);
*/
}
void loop()
{
/*int xAxis = 0;
int yAxis = 0;
int zAxis = 0;
*/
int flexVal1;
int flexVal2;
int flexVal3;
int flexVal4;
int sum;
int data;
/*
Wire.beginTransmission(MPU);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 14, true); // request a total of 14 registers
AcX = Wire.read() << 8 | Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY = Wire.read() << 8 | Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ = Wire.read() << 8 | Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
xAxis = round(-(AcX - 1121) / 32.0);
yAxis = round((AcY - 942) / 32.0);
zAxis = AcZ;
xAxis = constrain(xAxis, -40, 40) + xStable;
yAxis = constrain(yAxis, -40, 40) + yStable;
*/
flexVal1 = analogRead(flexpin1);
flexVal2 = analogRead(flexpin2);
flexVal3 = analogRead(flexpin3);
flexVal4 = analogRead(flexpin4);
sum=flexVal1+flexVal2+flexVal3+flexVal4; // 굽혔을 때 1000 이하, 폈을 때 1000이상
// Serial.print(xAxis); //왼쪽 90이하 오른쪽 90이상
// Serial.print(" ");
// Serial.print(yAxis);
// Serial.print(" ");
Serial.print(flexVal1);
Serial.print(" ");
Serial.print(flexVal2);
Serial.print(" ");
Serial.print(flexVal3);
Serial.print(" ");
Serial.print(flexVal4);
Serial.print(" ");
Serial.println(sum);
if(sum<1200) // 정지
{
xbee.write(1);
}
else if(sum>1600) // 직진
{
xbee.write(2);
}
else if(sum>1200 && flexVal3<350 && flexVal4<350) // 좌회전
{
xbee.write(3);
}
else if(sum>1200 && flexVal1<350 && flexVal2<350) // 우회전
{
xbee.write(4);
}
else if(sum>1200 && flexVal2<350 && flexVal3<350) // 후진
{
xbee.write(5);
}
}
// 송신부 장갑
#include<SoftwareSerial.h>
#include<Wire.h>
SoftwareSerial xbee(2,3);
/*
const int MPU = 0x68;
int16_t AcX, AcY, AcZ, Tmp, GyX, GyY, GyZ;
int xStable = 96;
int yStable = 90;
*/
int flexpin1 = A5;
int flexpin2 = A4;
int flexpin3 = A3;
int flexpin4 = A2;
void setup()
{
xbee.begin(9600);
Serial.begin(9600);
/*
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B);
Wire.write(0);
Wire.endTransmission(true);
acc scale
Wire.beginTransmission(MPU);
Wire.write(0x1C);
Wire.write(0xF8);
Wire.endTransmission(true);
*/
}
void loop()
{
/*int xAxis = 0;
int yAxis = 0;
int zAxis = 0;
*/
int flexVal1;
int flexVal2;
int flexVal3;
int flexVal4;
int sum;
int data;
/*
Wire.beginTransmission(MPU);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 14, true); // request a total of 14 registers
AcX = Wire.read() << 8 | Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY = Wire.read() << 8 | Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ = Wire.read() << 8 | Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
xAxis = round(-(AcX - 1121) / 32.0);
yAxis = round((AcY - 942) / 32.0);
zAxis = AcZ;
xAxis = constrain(xAxis, -40, 40) + xStable;
yAxis = constrain(yAxis, -40, 40) + yStable;
*/
flexVal1 = analogRead(flexpin1);
flexVal2 = analogRead(flexpin2);
flexVal3 = analogRead(flexpin3);
flexVal4 = analogRead(flexpin4);
sum=flexVal1+flexVal2+flexVal3+flexVal4; // 굽혔을 때 1000 이하, 폈을 때 1000이상
// Serial.print(xAxis); //왼쪽 90이하 오른쪽 90이상
// Serial.print(" ");
// Serial.print(yAxis);
// Serial.print(" ");
Serial.print(flexVal1);
Serial.print(" ");
Serial.print(flexVal2);
Serial.print(" ");
Serial.print(flexVal3);
Serial.print(" ");
Serial.print(flexVal4);
Serial.print(" ");
Serial.println(sum);
if(sum<1200) // 정지
{
xbee.write(1);
}
else if(sum>1600) // 직진
{
xbee.write(2);
}
else if(sum>1200 && flexVal3<350 && flexVal4<350) // 좌회전
{
xbee.write(3);
}
else if(sum>1200 && flexVal1<350 && flexVal2<350) // 우회전
{
xbee.write(4);
}
else if(sum>1200 && flexVal2<350 && flexVal3<350) // 후진
{
xbee.write(5);
}
}
// 송신부 장갑
#include<SoftwareSerial.h>
#include<Wire.h>
SoftwareSerial xbee(2,3);
/*
const int MPU = 0x68;
int16_t AcX, AcY, AcZ, Tmp, GyX, GyY, GyZ;
int xStable = 96;
int yStable = 90;
*/
int flexpin1 = A5;
int flexpin2 = A4;
int flexpin3 = A3;
int flexpin4 = A2;
void setup()
{
xbee.begin(9600);
Serial.begin(9600);
/*
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B);
Wire.write(0);
Wire.endTransmission(true);
acc scale
Wire.beginTransmission(MPU);
Wire.write(0x1C);
Wire.write(0xF8);
Wire.endTransmission(true);
*/
}
void loop()
{
/*int xAxis = 0;
int yAxis = 0;
int zAxis = 0;
*/
int flexVal1;
int flexVal2;
int flexVal3;
int flexVal4;
int sum;
int data;
/*
Wire.beginTransmission(MPU);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 14, true); // request a total of 14 registers
AcX = Wire.read() << 8 | Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY = Wire.read() << 8 | Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ = Wire.read() << 8 | Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
xAxis = round(-(AcX - 1121) / 32.0);
yAxis = round((AcY - 942) / 32.0);
zAxis = AcZ;
xAxis = constrain(xAxis, -40, 40) + xStable;
yAxis = constrain(yAxis, -40, 40) + yStable;
*/
flexVal1 = analogRead(flexpin1);
flexVal2 = analogRead(flexpin2);
flexVal3 = analogRead(flexpin3);
flexVal4 = analogRead(flexpin4);
sum=flexVal1+flexVal2+flexVal3+flexVal4; // 굽혔을 때 1000 이하, 폈을 때 1000이상
// Serial.print(xAxis); //왼쪽 90이하 오른쪽 90이상
// Serial.print(" ");
// Serial.print(yAxis);
// Serial.print(" ");
Serial.print(flexVal1);
Serial.print(" ");
Serial.print(flexVal2);
Serial.print(" ");
Serial.print(flexVal3);
Serial.print(" ");
Serial.print(flexVal4);
Serial.print(" ");
Serial.println(sum);
if(sum<1200) // 정지
{
xbee.write(1);
}
else if(sum>1600) // 직진
{
xbee.write(2);
}
else if(sum>1200 && flexVal3<350 && flexVal4<350) // 좌회전
{
xbee.write(3);
}
else if(sum>1200 && flexVal1<350 && flexVal2<350) // 우회전
{
xbee.write(4);
}
else if(sum>1200 && flexVal2<350 && flexVal3<350) // 후진
{
xbee.write(5);
}
}
–
mobile RX codeFold codePlain text
Copy to clipboard
Open code in new window
EnlighterJS 3 Syntax Highlighter
// 수신부 RC카
#include<SoftwareSerial.h>
SoftwareSerial xbee(2,3);
#define STBY 6
#define IN1 7
#define IN2 8
#define IN3 9
#define IN4 12
#define PWM1 11
#define PWM2 10
void setup() {
xbee.begin(9600);
Serial.begin(9600);
pinMode(STBY, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(PWM1, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(PWM2, OUTPUT);
digitalWrite(STBY, HIGH);
analogWrite(PWM1, 128);
analogWrite(PWM2, 128);
}
void loop()
{
if(xbee.read()==1) // 정지
{
stopCar();
}
else if(xbee.read()==2) // 직진
{
forward();
}
else if(xbee.read()==3) // 좌회전
{
left();
}
else if(xbee.read()==4) // 우회전
{
right();
}
else if(xbee.read()==5) // 후진
{
backward();
}
else
{
stopCar();
}
delay(50);
}
// 전진
void forward()
{
analogWrite(PWM1, 128);
analogWrite(PWM2, 128);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
}
// 후진
void backward() {
analogWrite(PWM1, 128);
analogWrite(PWM2, 128);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
}
// 좌회전
void left() {
analogWrite(PWM1, 128);
analogWrite(PWM2, 128);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
}
// 우회전
void right() {
analogWrite(PWM1, 128);
analogWrite(PWM2, 128);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
}
// 정지
void stopCar() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}
// 수신부 RC카
#include<SoftwareSerial.h>
SoftwareSerial xbee(2,3);
#define STBY 6
#define IN1 7
#define IN2 8
#define IN3 9
#define IN4 12
#define PWM1 11
#define PWM2 10
void setup() {
xbee.begin(9600);
Serial.begin(9600);
pinMode(STBY, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(PWM1, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(PWM2, OUTPUT);
digitalWrite(STBY, HIGH);
analogWrite(PWM1, 128);
analogWrite(PWM2, 128);
}
void loop()
{
if(xbee.read()==1) // 정지
{
stopCar();
}
else if(xbee.read()==2) // 직진
{
forward();
}
else if(xbee.read()==3) // 좌회전
{
left();
}
else if(xbee.read()==4) // 우회전
{
right();
}
else if(xbee.read()==5) // 후진
{
backward();
}
else
{
stopCar();
}
delay(50);
}
// 전진
void forward()
{
analogWrite(PWM1, 128);
analogWrite(PWM2, 128);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
}
// 후진
void backward() {
analogWrite(PWM1, 128);
analogWrite(PWM2, 128);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
}
// 좌회전
void left() {
analogWrite(PWM1, 128);
analogWrite(PWM2, 128);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
}
// 우회전
void right() {
analogWrite(PWM1, 128);
analogWrite(PWM2, 128);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
}
// 정지
void stopCar() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}
// 수신부 RC카
#include<SoftwareSerial.h>
SoftwareSerial xbee(2,3);
#define STBY 6
#define IN1 7
#define IN2 8
#define IN3 9
#define IN4 12
#define PWM1 11
#define PWM2 10
void setup() {
xbee.begin(9600);
Serial.begin(9600);
pinMode(STBY, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(PWM1, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(PWM2, OUTPUT);
digitalWrite(STBY, HIGH);
analogWrite(PWM1, 128);
analogWrite(PWM2, 128);
}
void loop()
{
if(xbee.read()==1) // 정지
{
stopCar();
}
else if(xbee.read()==2) // 직진
{
forward();
}
else if(xbee.read()==3) // 좌회전
{
left();
}
else if(xbee.read()==4) // 우회전
{
right();
}
else if(xbee.read()==5) // 후진
{
backward();
}
else
{
stopCar();
}
delay(50);
}
// 전진
void forward()
{
analogWrite(PWM1, 128);
analogWrite(PWM2, 128);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
}
// 후진
void backward() {
analogWrite(PWM1, 128);
analogWrite(PWM2, 128);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
}
// 좌회전
void left() {
analogWrite(PWM1, 128);
analogWrite(PWM2, 128);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
}
// 우회전
void right() {
analogWrite(PWM1, 128);
analogWrite(PWM2, 128);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
}
// 정지
void stopCar() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}
Post Views: 1,615
I simply want to mention I’m newbie to weblog and actually liked your web page. More than likely I’m likely to bookmark your site . You absolutely have terrific writings. Cheers for revealing your website page.
Nice post. I learn something new and challenging on sites I stumbleupon on a daily basis. It will always be interesting to read through content from other authors and use a little something from their websites.
You should take part in a contest for one of the greatest blogs on the net. I’m going to highly recommend this website!