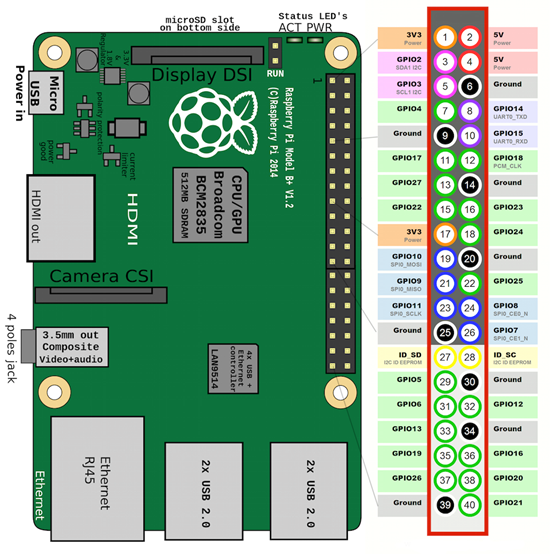
Raspberry Pi pin map
GPIO Setup
- gpio를 다루기전에 먼저 필요한 툴과 라이브러리를 다운
sudo apt-get install git-core
->쉘에서 위의 명령어를 실행(소스관리툴)
git clone git://git.drogon.net/wiringPi
->소스관리툴이 설치가 다 되면 wiringPi프로젝트를 다운 (gpio를 다루는 라이브러리)
cd wiringPi // wiringPi 디렉터리에 들어가기
./build // wiringPi를 설치
gpio -v gpio readall // 설치가 잘되었는지 확인
Gpio readall // 자신의 라즈베리파이의 gpio확인
Code Writing Process
mkdir python // Python 폴더를 하나 만들고
cd python // python 폴더로 이동
sudo nano test.py // test라는 이름의 파이썬 파일을 나노편집기에서 열기
코드 작성
Ctrl X 눌러서 나오기
sudo python test.py // test파일 실행
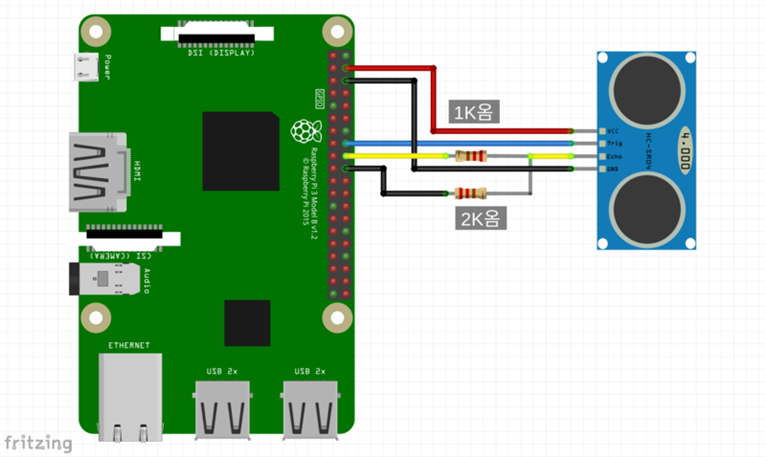
Circuit
Code
# -*- coding: utf-8 -*-
import RPi.GPIO as GPIO
import time
import sys
import signal
#GPIO 핀
TRIG = 23 # 트리거
ECHO = 24 # 에코
#거리 타임 아웃 용
MAX_DISTANCE_CM = 300
MAX_DURATION_TIMEOUT = (MAX_DISTANCE_CM * 2 * 29.1) #17460 # 17460us = 300cm
# 키보드 CTRL + C 누르면 종료 되게 처리
def signal_handler(signal, frame):
print('You pressed Ctrl+C!')
GPIO.cleanup()
sys.exit(0)
signal.signal(signal.SIGINT, signal_handler)
# cm 환산 함수
# 아두이노 UltraDistSensor 코드에서 가져옴
def distanceInCm(duration):
# 물체에 도착후 돌아오는 시간 계산
# 시간 = cm / 음속 * 왕복
# t = 0.01/340 * 2= 0.000058824초 (58.824us)
# 인식까지의 시간
# t = 0.01/340 = 0.000029412초 (29.412us)
# duration은 왕복 시간이니 인식까지의 시간에서 2로 나눔
return (duration/2)/29.1
# 거리 표시
def print_distance(distance):
if distance == 0:
distanceMsg = 'Distance : out of range \r'
else:
distanceMsg = 'Distance : ' + str(distance) + 'cm' + ' \r'
sys.stdout.write(distanceMsg)
sys.stdout.flush()
def main():
# 파이썬 GPIO 모드
GPIO.setmode(GPIO.BCM)
# 핀 설정
GPIO.setup(TRIG, GPIO.OUT) # 트리거 출력
GPIO.setup(ECHO, GPIO.IN) # 에코 입력
print('To Exit, Press the CTRL+C Keys')
# HC-SR04 시작 전 잠시 대기
GPIO.output(TRIG, False)
print('Waiting For Sensor To Ready')
time.sleep(1) # 1초
#시작
print('Start!!')
while True:
#171206 중간에 통신 안되는 문제 개선용
fail = False
time.sleep(0.1)
# 트리거를 10us 동안 High 했다가 Low로 함.
# sleep 0.00001 = 10us
GPIO.output(TRIG, True)
time.sleep(0.00001)
GPIO.output(TRIG, False)
# ECHO로 신호가 들어 올때까지 대기
timeout = time.time()
while GPIO.input(ECHO) == 0:
#들어왔으면 시작 시간을 변수에 저장
pulse_start = time.time()
if ((pulse_start - timeout)*1000000) >= MAX_DURATION_TIMEOUT:
#171206 중간에 통신 안되는 문제 개선용
#continue
fail = True
break
#171206 중간에 통신 안되는 문제 개선용
if fail:
continue
#ECHO로 인식 종료 시점까지 대기
timeout = time.time()
while GPIO.input(ECHO) == 1:
#종료 시간 변수에 저장
pulse_end = time.time()
if ((pulse_end - pulse_start)*1000000) >= MAX_DURATION_TIMEOUT:
print_distance(0)
#171206 중간에 통신 안되는 문제 개선용
#continue
fail = True
break
#171206 중간에 통신 안되는 문제 개선용
if fail:
continue
#인식 시작부터 종료까지의 차가 바로 거리 인식 시간
pulse_duration = (pulse_end - pulse_start) * 1000000
# 시간을 cm로 환산
distance = distanceInCm(pulse_duration)
#print(pulse_duration)
#print('')
# 자리수 반올림
distance = round(distance, 2)
#표시
print_distance(distance)
GPIO.cleanup()
if __name__ == '__main__':
main()
2019 04 10 Raspberry Pi LED Sonar Sensor
I just want to mention I am newbie to blogs and honestly loved this web page. Likely I’m want to bookmark your site . You actually come with awesome article content. With thanks for revealing your blog site.